Verifizierung des KI-gesteuerten Systems
Das Beckhoff-System demonstriert die Fähigkeiten von TraceTube anhand eines KI-gesteuerten Simulators für ein umgekehrtes Pendel – das klassische Problem, ein Pendel auf einem sich bewegenden Wagen auszubalancieren. Der KI-Controller hält das Pendel aufrecht, während TraceTube seine Robustheit bewertet, indem es Grenzwerte generiert, die den sicheren Betriebsbereich des Systems zeigen. Diese Demo unterstreicht TraceTubes Fähigkeit, KI-Modelle zu verifizieren und Sicherheit in dynamischen Echtzeitanwendungen zu gewährleisten.
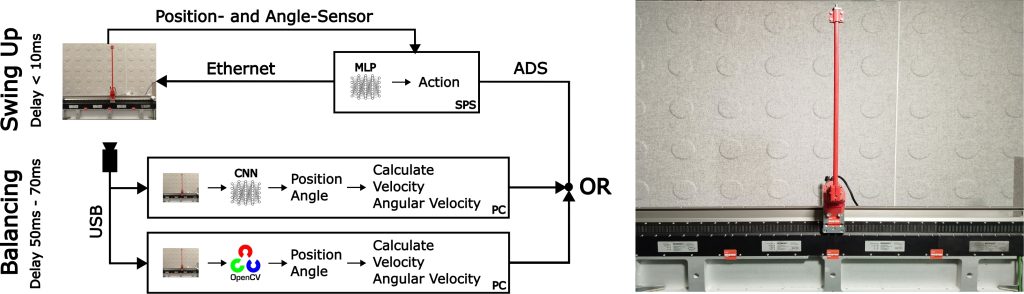
Der Controller wurde mit Hilfe von Reinforcement Learning Methoden auf einer simulierten Umgebung mit physikalischen Gleichungen trainiert, die den Aufbau beschreiben. Die Länge der Stange, die Masse der Stange, die Beschleunigung des Wagens (die Reaktionsfähigkeit des Wagens), die Position des Wagens und der Winkel des Pendels wurden als Parameter zur Modellierung und Steuerung des Systems verwendet. Das TraceTube-Tool wurde separat für die Verifizierung der Aufschwing- und der Ausgleichsphase verwendet.
Der Ausbalancierungsprozess wurde verifiziert, als er einem Wechsel von Sensordaten zu Kameradaten ausgesetzt war. Dieser Umschaltpunkt ist in der Grafik mit einer höheren Variation im Systemverhalten zu erkennen. Dieser Prozess beweist die Fähigkeit von TraceTube, komplexe Systeme zu verifizieren, wenn sich die Bedingungen ändern und die Umgebungsattribute unterschiedlich sind. Dieser Anwendungsfall stellt ein generisches Beispiel für die Einsatzgebiete von TraceTube dar.